Die Komponenten für den Prototypen:
- China RoboCar Chassis inkl. DC Getriebemotoren 5V mit Encoderrad und 4x AA Batteriefach
- UltraschallSensor HC-SR04
- L298N Dual Motor Controller Module 2A
- Arduino UNO
- ProtoShield for Arduino UNO
- 2x Gabellichtschranken
 |
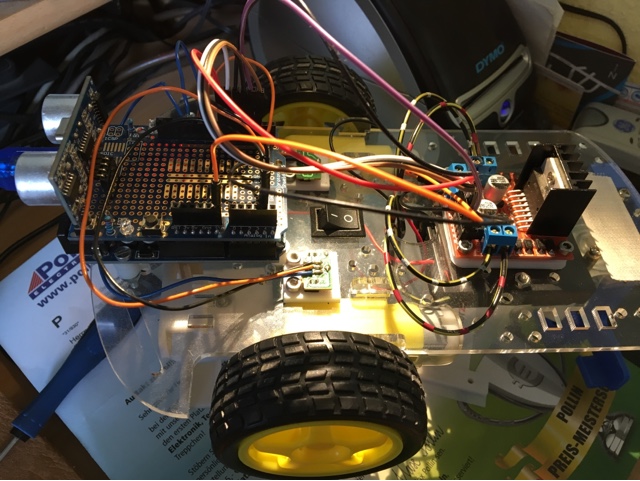
| Chassis mit Aufbau |
 |
| Motoren mit Encoderrad und Batteriehalter 4x AA (6V) |
 |
|
| Schaltung für die Gabellichtschranken (blau – GND / orange – +5V / schwarz – GRD / Signal I/O – Dig.PIN 2 und 3) |
- Der Arduino wird gegen einen ArduinoMicro getauscht
- Das Batteriefach gegen einen größeren Akku bzw. eine PowerBank
- Es kommen weitere Kontakt-/Abstandssensoren
Wenn sichergestellt ist, das die Basis so funktioniert wie sie soll, wir das Projekt auf eine entsprechende Mechanik übertragen.
Der Code für den Arduino bis jetzt:
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
// PINs for UltraSonic#define pingPin 10
#define inPin 8
// PINs for Motor 1 DIR#define wheel_R_f 6
#define wheel_R_b 7
// PINs for Motor 2 DIR#define wheel_L_f 12
#define wheel_L_b 13
// PINs for Motor 1 Enable/Speed (PWM)#define wheel_R_En 5
// PINs for Motor 2 Enable/Speed (PWM)#define wheel_L_En 11
// Motorspeedint mspeed = 150;
// Turning circleint turnAround = 100;
// Current directionint currentDir = 0;
// Encoder#define Encoder_R 2
int EncoderCount_R = 0;
#define Encoder_L 3
int EncoderCount_L = 0;
// Setup Serial, Encoder- and MototrPINsvoid setup() {
pinMode(wheel_R_f, OUTPUT);
pinMode(wheel_R_b, OUTPUT);
pinMode(wheel_L_f, OUTPUT);
pinMode(wheel_L_b, OUTPUT);
pinMode(wheel_R_En, OUTPUT);
pinMode(wheel_L_En, OUTPUT);
// Setup EncoderpinMode(Encoder_R,INPUT);
pinMode(Encoder_L,INPUT);
attachInterrupt(0, isr_Encoder_R, CHANGE);
attachInterrupt(1, isr_Encoder_L, CHANGE);//All Motors STOPmstop();
// Robo goes forwardgoforward();
}
void loop()
{
// establish variables for duration of the ping,
// and the distance result in centimeters:long duration, cm;
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(10);
digitalWrite(pingPin, LOW);
// The same pin is used to read the signal from the PING))): a HIGH
// pulse whose duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(inPin, INPUT);
duration = pulseIn(inPin, HIGH);
// convert the time into cmcm = microsecondsToCentimeters(duration);
// *******************************************************************************
// If the Ultrasonic Sensor detect an object whith a disstance smaler then 15cm,
// stop than go backward for 150ms, turn around 180°, stop, than go forward againif (cm < 15)
{
mstop();
gobackward();
delay(1000);
gobackwardCL();
// delay(2500);
mstop();
CountReset();
goforward();
}
// Automatically synchronize the speed of the wheelsif (EncoderCount_L < EncoderCount_R)
{
analogWrite(wheel_R_En, mspeed-20);
analogWrite(wheel_L_En, mspeed+20);
}
if (EncoderCount_R < EncoderCount_L)
{
analogWrite(wheel_R_En, mspeed+20);
analogWrite(wheel_L_En, mspeed-20);
}
delay(100);
}
// *******************************************************************************long microsecondsToCentimeters(long microseconds)
{
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled.return microseconds / 29 / 2;
}
// Function: All Motors STOPvoid mstop ()
{
digitalWrite(wheel_R_b, LOW);
digitalWrite(wheel_L_b, LOW);
digitalWrite(wheel_R_f, LOW);
digitalWrite(wheel_L_f, LOW);
analogWrite(wheel_R_En, 0);
analogWrite(wheel_L_En, 0);
currentDir = 0;
delay(500);
}
// Function: All Motors go forwardvoid goforward ()
{
digitalWrite(wheel_R_f, HIGH);
digitalWrite(wheel_L_f, HIGH);
digitalWrite(wheel_R_b, LOW);
digitalWrite(wheel_L_b, LOW);
currentDir = 1;
for (int ispeed = 100; ispeed <= mspeed; ispeed=ispeed+2)
{
analogWrite(wheel_R_En, ispeed);
analogWrite(wheel_L_En, ispeed);
delay(20);
}
}
// Function: All Motors go backwardvoid gobackward ()
{
digitalWrite(wheel_R_f, LOW);
digitalWrite(wheel_L_f, LOW);
digitalWrite(wheel_R_b, HIGH);
digitalWrite(wheel_L_b, HIGH);
currentDir = 2;
for (int ispeed = 100; ispeed <= mspeed; ispeed=ispeed+2)
{
analogWrite(wheel_R_En, ispeed);
analogWrite(wheel_L_En, ispeed);
delay(20);
}
}
// Function: Go in a backward-circle to the leftvoid gobackwardCL ()
{
digitalWrite(wheel_R_f, HIGH);
digitalWrite(wheel_L_f, LOW);
digitalWrite(wheel_R_b, LOW);
digitalWrite(wheel_L_b, HIGH);
currentDir = 3;
CountReset();
for (int ispeed = 100; ispeed <= mspeed; ispeed=ispeed+2)
{
analogWrite(wheel_R_En, ispeed);
analogWrite(wheel_L_En, ispeed);
delay(20);
}
do
{
if (EncoderCount_R >= turnAround)
analogWrite(wheel_R_En, 0);
if (EncoderCount_L >= turnAround)
analogWrite(wheel_L_En, 0);
} while (EncoderCount_R < turnAround && EncoderCount_L < turnAround);
}
// Function: Go in a backward-circle to the rightvoid gobackwardCR ()
{
digitalWrite(wheel_R_f, LOW);
digitalWrite(wheel_L_f, HIGH);
digitalWrite(wheel_R_b, HIGH);
digitalWrite(wheel_L_b, LOW);
currentDir = 4;
CountReset();
for (int ispeed = 100; ispeed <= mspeed; ispeed=ispeed+2)
{
analogWrite(wheel_R_En, ispeed);
analogWrite(wheel_L_En, ispeed);
delay(20);
}
do
{
if (EncoderCount_R >= turnAround)
analogWrite(wheel_R_En, 0);
if (EncoderCount_L >= turnAround)
analogWrite(wheel_L_En, 0);
} while (EncoderCount_R < turnAround && EncoderCount_L < turnAround);
}
// Reset the EncoderCounts (left and right)void CountReset()
{
EncoderCount_L = 0;
EncoderCount_R = 0;
}
// ISR – Encoder rightvoid isr_Encoder_R ()
{
EncoderCount_R++;
}
// ISR – Encoder leftvoid isr_Encoder_L ()
{
EncoderCount_L++;
}
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
Vielen Dank für den Code der den Ultraschallsensor belebt geht an: http://www.robodino.de/2011/12/ultraschall-distanz-sensor-hc-sr04.html

